官方微信:日成最新資訊
官方微信:日成最新資訊 移動(dòng)官網(wǎng)
移動(dòng)官網(wǎng) 官方商城
官方商城隨著智能駕駛的熱度逐漸上升,包括中國(guó)在內(nèi)的世界各國(guó)已經(jīng)開(kāi)始推進(jìn)相關(guān)工作并進(jìn)行布局,中國(guó)的無(wú)人駕駛技術(shù)也正在逐步走向成熟。但是,智能駕駛在很多方面正面臨著挑戰(zhàn)。
對(duì)此,中國(guó)自動(dòng)化學(xué)會(huì)理事長(zhǎng)、西安交通大學(xué)鄭南寧院士在論壇中闡述的自己的觀點(diǎn),他認(rèn)為自主駕駛正面臨著不確定性、脆弱性和開(kāi)放性等諸多問(wèn)題,應(yīng)將場(chǎng)景感知和情境認(rèn)知區(qū)別開(kāi),從情境認(rèn)知的角度重新定義自主駕駛。
當(dāng)下,以智能輔助駕駛和智能安全為代表技術(shù)的智能車(chē)研究,正在以超乎想象的速度發(fā)展。“涉及無(wú)人駕駛關(guān)鍵技術(shù)的各種新方法和新工藝都在不斷地涌現(xiàn),但是技術(shù)上還存在缺陷,全面自主的駕駛技術(shù)還處于一種比較早期的階段,所以面向未來(lái)的無(wú)人駕駛,要關(guān)注的是建立研發(fā)和驗(yàn)證技術(shù)的核心能力”,西安交通大學(xué)人工智能與機(jī)器人研究所高級(jí)工程師徐林海如是表示。
北京理工大學(xué)教授龔建偉認(rèn)為,為提高自動(dòng)駕駛車(chē)輛的智能決策和控制水平,應(yīng)當(dāng)開(kāi)展決策規(guī)劃與控制過(guò)程中類(lèi)人知識(shí)表達(dá)與經(jīng)驗(yàn)學(xué)習(xí)研究,突破小樣本個(gè)性化單一駕駛員學(xué)習(xí)局限。通過(guò)駕駛基元數(shù)據(jù)采集與建模、環(huán)境創(chuàng)建、持續(xù)優(yōu)化學(xué)習(xí)、測(cè)試評(píng)價(jià),適應(yīng)多駕駛員多場(chǎng)景數(shù)據(jù)學(xué)習(xí),實(shí)現(xiàn)駕駛員知識(shí)與經(jīng)驗(yàn)在不同場(chǎng)景的泛化。

如今,汽車(chē)正越來(lái)越快地從機(jī)械化向智能化轉(zhuǎn)變。在汽車(chē)發(fā)展新時(shí)代下,打造安全、智能的產(chǎn)品和服務(wù),為用戶提供“人—車(chē)—生活”智聯(lián)解決方案,將會(huì)成為未來(lái)的發(fā)展方向。
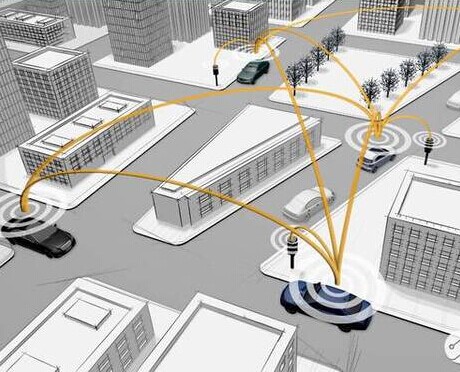
中國(guó)自動(dòng)化學(xué)會(huì)副理事長(zhǎng)兼秘書(shū)長(zhǎng)、中國(guó)科學(xué)院自動(dòng)化研究所王飛躍教授在“平行駕駛”領(lǐng)域探索多年,他提出的用平行技術(shù)實(shí)現(xiàn)駕駛自動(dòng)化備受關(guān)注。他認(rèn)為,平行駕駛的最初想法就是要將無(wú)人車(chē)技術(shù)充分利用起來(lái),使之成為輔助人類(lèi)駕駛的在線“軟件機(jī)器人”系統(tǒng),讓駕駛變得輕松,關(guān)鍵時(shí)刻可以采取措施,避免危險(xiǎn)。在王飛躍看來(lái),從平行汽車(chē)到平行交通將是面向智能網(wǎng)聯(lián)發(fā)展的趨勢(shì)與必然。
對(duì)于汽車(chē)產(chǎn)業(yè)而言,在發(fā)展的過(guò)程中會(huì)同時(shí)面臨產(chǎn)業(yè)機(jī)遇和能源資源有限等問(wèn)題,因此如何引導(dǎo)企業(yè)的發(fā)展方向就顯得尤為關(guān)鍵。國(guó)家發(fā)改委城市中心交通規(guī)劃院張國(guó)華教授認(rèn)為,能源互聯(lián)網(wǎng)與智能交通相結(jié)合,將有效提高車(chē)輛使用及人群出行效率,應(yīng)努力實(shí)現(xiàn)這方面的技術(shù)突破,同時(shí)要注意政府、企業(yè)、公眾和智庫(kù)的四方協(xié)同。未來(lái)成功的汽車(chē)企業(yè)一定是利用汽車(chē)服務(wù)創(chuàng)造新應(yīng)用和新價(jià)值的企業(yè)。
文章來(lái)源:中國(guó)工業(yè)新聞網(wǎng)--中國(guó)工業(yè)報(bào)